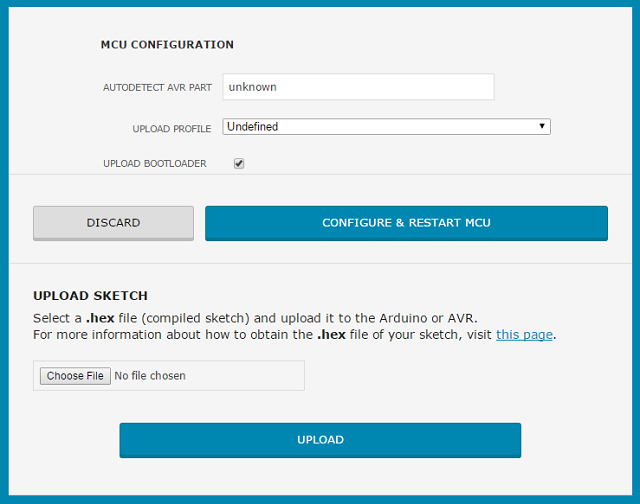
Autodetect AVR PART show unknow. Upload will be failed.
avrdude: AVR device not responding avrdude: initialization failed, rc=-1 Double check connections and try again, or use -F to override this check.
To confirm the problem by:
1/ Enable the NTB0104 level shift by set high to GPIO19: commands is as below:
echo 1 > /sys/class/gpio/gpio19/value
2/ Check if MOSI/MISO/SCK/RST hardware connection works as expect, below is the PIN mapping with the GPIOs. User can export the GPIOs in linux and run the commands as below to set high / low to GPIO. The related SPI pins will be high(+5V) / low accordingly and can be check by a multimeter. Low is 0v and high is 3.3v or 5v depends on the Arduino board.
Below is the commands need to type and check whether GPIO works.
echo 1 > /sys/class/gpio/gpio19/value // enable level shift echo 18 > /sys/class/gpio/export //export gpio 18 echo "high" > /sys/class/gpio/gpio18/direction // set direction to out and set level to high echo "1" > /sys/class/gpio/gpio18/value // set this GPIO to high, SPI_SCK should be high in the ICSP header. echo "0" > /sys/class/gpio/gpio18/value // set this GPIO to low, SPI_SCK should be low in the ICSP header. echo 21 > /sys/class/gpio/export //export gpio 21 echo "high" > /sys/class/gpio/gpio21/direction // set direction to out and set level to high echo "1" > /sys/class/gpio/gpio21/value // set this GPIO to high, SPI_MOSI should be high in the ICSP header. echo "0" > /sys/class/gpio/gpio21/value // set this GPIO to low, SPI_MOSI should be low in the ICSP header. echo 22 > /sys/class/gpio/export //export gpio 22 echo "high" > /sys/class/gpio/gpio22/direction // set direction to out and set level to high echo "1" > /sys/class/gpio/gpio22/value // set this GPIO to high, SPI_MISO should be high in the ICSP header. echo "0" > /sys/class/gpio/gpio22/value // set this GPIO to low, SPI_MISO should be low in the ICSP header. echo 20 > /sys/class/gpio/export //export gpio 20 echo "high" > /sys/class/gpio/gpio20/direction // set direction to out and set level to high echo "1" > /sys/class/gpio/gpio20/value // set this GPIO to high, SPI_RST should be low in the ICSP header. echo "0" > /sys/class/gpio/gpio20/value // set this GPIO to low, SPI_RST should be high in the ICSP header.
Comments powered by CComment